無線ユニットの概要
赤外線を直接拡散型スペクトラム拡散変調(DSSS)して通信します。
DSSSの利点
・ノイズに強い。原理的にはS/N比が1以下になってもデコード可能。
・混信に強い。原理的には全く同じ周波数帯域に他の信号があってもデコード可能。
・混信が弱い。原理的には同じ周波数帯域にある他の通信を殆ど邪魔しない。筈。
・秘話性が高い。原理的には、使っている系列を知らない人間が傍受・混信させる事はほぼ無理。数十倍の出力が必要。
と言うか、系列を知らないと通信が行われているかどうかを知る事も困難。
DSSSの欠点
・受信側と送信側の同期を完全に取らないと全く受信出来ない。
・一回同期が外れると復帰するまでにある程度の間が必要。
・同期を保持する為、信号を出しっぱなしにしなければならない。
・回路が複雑。アナログでやると相当規模な回路が必要。
具体的な仕様
通信速度
1.2kbps
変調
直接拡散型スペクトラム拡散変調(DSSS)
変調速度
63チップ毎ビット
使用系列
6次M系列
受信機
処理方法
デジタル処理
処理プロセッサ
H8/3052
送信機
赤外線エミッタ
秋月電子製 赤外線投光器キットAE-LED56 + 定電流ドライバ
処理プロセッサ
H8/3052
受信機の構成
GCAで増幅した後、H8でDSSSをデコードしてます。
出力は普通の赤外線モジュールと同じ。つまり制御用MPUが他に必要です( ゚∀゚)
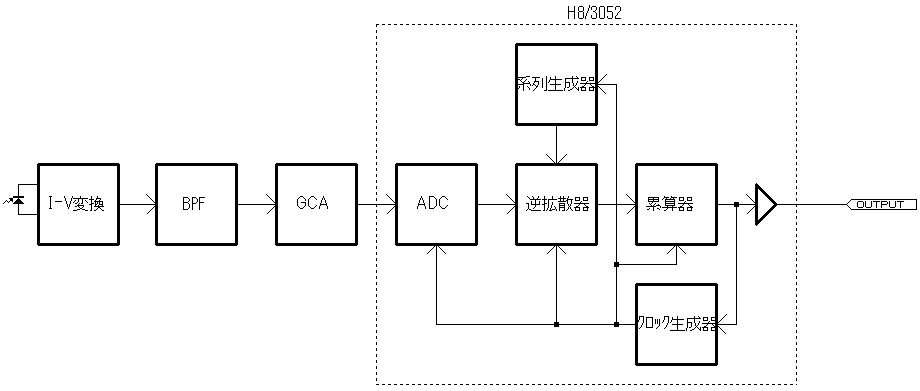
ブロック図は以下の通り。
破線に囲まれた領域が、H8で処理している部分です。
・I-V変換は、フォトダイオードの電流信号を電圧信号に変換します。
・BPFは、不要なノイズとなる100Hz以下の信号と100kHz以上の信号をカットします。
・ADCは言わずもがな。
・逆拡散器は、入力された信号と生成された系列を乗算します。
・系列生成器は、1と-1から成る、6次のM系列を生成します。
・累算器は、1周期間の逆拡散器からの信号を総和します。
・クロック生成器は、ADCから累算器までの動作タイミングを制御します。
・累算器の出力を閾値0のインバータに通して出力とします。
DSSSの同期捕捉はSerialShift方式、同期追跡は演算が少なくて済むのでタウ・ディザループを使ってます。
リセットした直後は、クロック生成器は同期捕捉モードになっています。
同期捕捉モード中は、1周期終わった時点でクロック生成器が1/2チップ分位相を遅らせます。
こうする事によって同期タイミングをずらす訳です。
累算器の出力が閾値を超えた場合、クロック生成器は同期を捕捉したと判断して、同期追跡モードになります。
同期がずれている場合、累算器の出力の絶対値はM系列の自己相関の原理から小さくなります。
その時は同期が取れるまで処理を行います。
同期追跡モード中は、まず1周期目は普通にデコードします。
次に、2周期目の頭でわざと位相を1/10進ませてからデコードします。
そして1周期目と2周期目の累算器の出力の絶対値を比較します。
1周期めの方が大きかった場合、進ませる前の方が同期が取れていたと判断し、次の周期は2/10位相を遅らせてから処理を行います。
2周期目の方が大きかった場合、進ませた後の方が同期が取れていると判断し、次の周期は今の位相のままで処理を行います。
同期追跡モードの時に累算器の出力の絶対値が閾値を下回った場合、同期が外れたと判断し同期捕捉モードになります。
同期追跡モードの時は、累算器の出力が正の場合は1、負の場合は0を出力します。
これがデコードされたデータになります。
意見・質問は
書込上等
まで
■
メールは
猫@せんだい電波高専
まで