��{�҂͖��ɗ��������ȏ��������Ă��̂Ń��[�^�h���C�u�҂͐^�ʖڂɷ����珑���܂���(�@߁��)���݂ɂ��̕ӂ���݂ň�ʓI�Ɏg���ł��낤�Ǝv����DCӰ��Ɍ����Đ������܂��B�ï��ݸ�Ӱ��Ƃ����������̎g�������l�͑��̻�Ă��i��
�܂�Ӱ���ײ�ނƂ͉�����H�Ƃ����Ƃ��납��B
Ӱ���ײ�ނƂ͕����ʂ�Ӱ������Ƃł��BDCӰ����Ă͓̂d�������Ă��Ή�]����Ƃ����Ђ�����[�ɉ���₷�������ł��B����čł��ȒP��Ӱ���ײ�ނ͈ȉ��̂悤�ɂȂ�܂��B
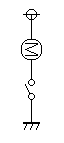
�N�������̂́B
��{�͑厖�ł����{��(�L߁[�`)=3
���Ă��̉�H���ƐF�X��肪����܂��B�t�]�o���܂���B�����ĂȂɂ���l�����������Ȃ���Ȃ�܂����B(�@߁��)�Ԗ{�C�Ō�����Ͻ։��́B
���̂܂܂�����݂ł͑S���g���܂���ˁB����2�̖���@���ɉ������邩���߲�Ăł��B
���āA�l�ȊO�Ž�����������@�͂��ꂱ�������ɂ����Ă��ꂪӰ���ײ�ނ̊̂Ȃ̂Ō�ł������������܂��B��芸���������ł͋t�]���o������ײ�ނ̐��������܂��B
�t�]������ɂ͋t�����̓d���𗬂���������A�t�����ɂ�����d���q���β��ެ݂��ƌ������z�ŏo�����̂��ȉ�����ײ�ށB
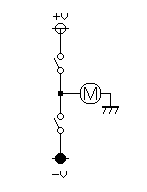
�����T��د���ƌ����܂��B
���i�������Ȃ��ĊȒP�Ƃ������_��������̂́A�d����2�K�v�Ƃ����f���炵�����_�������Ă��܂��B
�Ⴆ�AӰ���20������H��د�ނȂg��ł��邩�����Ď��ɂ͍œK�ł��B
�܂����ʂ͂��ꂾ�Ǝg���Â炢�ł��ˁB�ŁA�d������ł��t�]�o����悤�ɂ����̂�������ײ�ށB
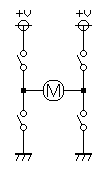
�����H��د���ƌ����܂��B
�����ł��V��H��د�ނł��B�V�ɂ͓d������ōςށA��ڰ����g����Ȃǂ̗��_������܂��B�A����H�\���͕��G�ɂȂ�܂��B���i�������ł��B
��ʓI����݂ł́A�d������ōςށA��ڰ����g����Ȃǂ̗��_����H��د�ނ��g���ꍇ�������ł��B�Ă�T��د�ގg���Ă�ϼ݂��ĕ��������Ƃ��Ȃ��ł��B�܂��l���悤�ɂ���Ă�T�̓d����2�K�v���Ă̂͗��_�ɂ��Ȃ蓾�܂����BPWM�g��Ȃ��Ă��O�i�ƌ�i�̑��x�ς����܂��B�ܰ����
���z��ɂ͓d�����~�b�^��H��د�ނȂ̕K�v��H���S�������ĂāA��{�I��ϲ�݂�Ӱ��ɒ������ēd���q���Γ����܂��B���ӂ���Ƃ���Ƃ��ẮA��A���������Ȃ����ď��ł��ˁB8429�ł�4.5A�A8440�ł�3A���������ŏ�����Я��|����܂��B���AH��د�ނɎg���Ă���ݼ��̔��M���ł����̂ł���ȓd���ł��M���Ȃ�܂��B���M��t���܂��傤�B
��{�I�ɂ��ꂾ���ł�����B
�ڰ���ďo�͂͂��̂܂�ܽ����ł�����˂��B�Ă��ڰ���ēd�C�ʼn����齲�����̂��̂ł�����˂��B��Ő������Ă�e�X�̽������ڰ�Œu�������邾���ł��B���Ƃ������B
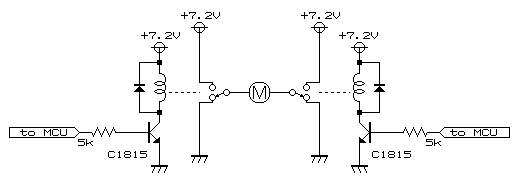
H��د�ނ̽������ڰ�ƒu�������Ă݂܂����BH��د�ނ͏㉺�̽�����������ON�ɂȂ邱�Ƃ͂Ȃ��̂ŁA����Ȋ�����3�[�q�����ɒu�������邱�Ƃ��o���܂��B(�@߁��)�ȒP�ł��ˁB
������ײ�ނͼ���قʼn���₷���ł��B�����Ĉ����₷���ł��B�����Ă���ɁA����n�Ɠ��͌n���d�C�I�ɕ������Ă���̂�Ӱ�ɲ�ނ�ϲ�݂ɉ�荞�݂܂���B���_�́APWM���g���܂���B�X�ɑ傫�����_���A�傫���ł��B�傫�����B���̕��d���ł��B
�����ĂċC�Â��܂������A�ڰ�̏ꍇT��د�ނ�H��د�ނǂ���ł��g���ڰ�̐���2�ŕς��܂���B�ڰ�g�����͑f����H��د�ނɂ��܂��傤�B�w�ǂ̓_��T�ɕ����邩����܂��B
���`�����������H�}���ɏ����Ă܂����A�ڰ����ݼ��ŋ쓮���鎞������ނ�t���܂��傤�B�K�{�ł��B�ڰ�Ȃ̗U�������ׂ́A����ݸނ������ɋt�N�d�����o�Ă�������ݼ��������ɂȂ�̂ŁB���ӓ_�͂���ʂł�����( �L_�T`)
�ڰ��Nch-FET��g�ݍ��킹�Ďg���ꍇ������܂��B�ڰ�͋@�B������FET�͓d�q�����Ȃ̂ŁA���ꂼ��̗��_�����킹��Ɠs���̗ǂ����Ƃ���������ł��B�ȉ���ʓI�ȗ�B
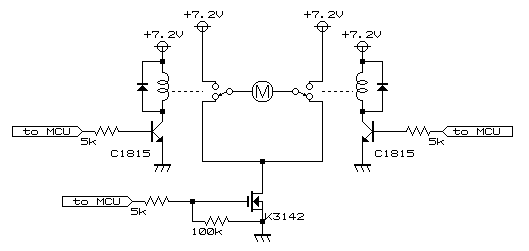
���̏ꍇ�A�ڰ�݂̂̏ꍇ�Ɣ�ׂĈȉ��̂悤�ȗ��_�����܂�܂��B
- PWM���g����
FET�������Ă���̂�PWM���|���邱�Ƃ��o���܂��B - �ڰ��ւ��鎞��FET��OFF�ɂ��Ă����A�ڰ�̐ړ_��ی삵�A��i�ȏ�̑�d����������
�ƁAT���������Ă���܂���(�@߁��) - �ڰ��ւ��鎞��FET��OFF�ɂ��Ă����A�@�B�ړ_����ɲ�ނ��o�Ȃ�
����܂�d�v�ł͂Ȃ��Ȃ���́i��
- �v���y
H��د�ނ��ڰ�ō\�����Ă���̂ŁAʲ���ނ̽����ɂ��ĔY�ޕK�v������܂���B�i����ɂ��Ă͎����ڈȍ~�ʼn�� - ���萫������
�v���y�A�Ă̂ɂ��ʂ��܂����AFET�݂̂ō\���������̂̏ꍇ�A������Ƃ����v�̕s���A���t�Ȉ����i�d������鏇�ԊԈႤ�Ȃǁj�������Ɍq����܂��B���ې܂�͂܂������m��Ȃ��������AFET�ɉΓ����x�ɔR���o�����|�Ɛ���Ă܂����B���۔R���Ă܂�����(�@߁��)
- �ǂ���Ɣ�ׂĂ���H���傫���d��
(߁��)�S�ɖ���FETƕ������۰��
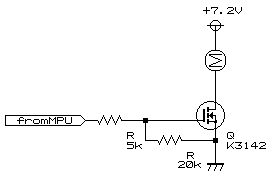
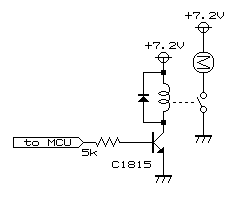
�t�]�E��ڰ����s�v�Ȃ�A����ʊȒP�ȉ�H�ŏ\���쓮�o���܂��B
���݂�G-S�Ԃɓ����Ă�20kohm�̒�R�͓d��ON���̕ی�p�ł��B����Ȃ��ƐÓd�C��FET������ON�ɂȂ��ĉ�H�����Ӱ��ɓd���q�������ɖ\��������R�����肵�܂�(�@߁��)
���āA������FET��H��د�ޑg�ޏꍇ�B
(�L߄D�`)�����Ȃ�ʓ|�ɂȂ�܂����˴��B���炩��ʲ���ނ��ʓ|�Ȃ̂����Ď���Ǝv���܂��B����ʲ���ނ̋쓮���ʓ|���BFET�Ϳ���̓d������ɓ�����ł����APch�̏ꍇʲ���ނͿ����+�d���̓d���ɂȂ�܂��B�ɑ���ϲ�݂���̐M����GND��ł��B���̍���ϊ����邽�߂���ݼ����K�{�Ȃ�ł��ˁB
���݂ɕ�����Ǝv���܂����Aʲ���ނ�۰���ނ���ON�����Ȃ��悤�ɁB�����ް�ݸޑ�т��܂��B��Ѷ��тŐ펀���܂��B��̓I�ɂ�ʲ���ɓ���Ȃ��悤�ɁB
������ւ��鎞�����ӂ��鎖�BFET�ƌ����ǂ���u�ł�OFF�ɂȂ�܂���B��ւ��鎞�͂ǂ�����۰�̎��Ԃ����ĉ������B�ޯ����т��ēz�ł���(*�L�D`*)
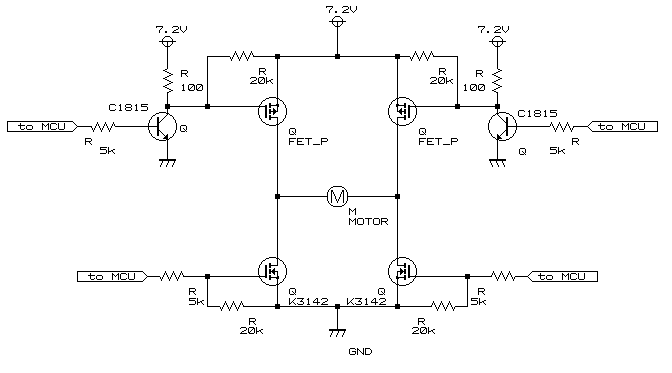
���̐}�ł�ϲ�݂̏o�͂Œ���FET���쓮���Ă��܂��B
�ŁAϲ�݂̏o�͓͂d������������ɓd����5V�܂ł����o�܂���B��������Ē���FET�쓮����ƁA�������Ƃɂ͓����܂���FET�̐��\���ő�������o���܂���BPWM�|���鎞�ɔ��M���ł����Ȃ�܂��B
�ǂ����邩�B�ȉ��̂悤�ɂ��܂��B
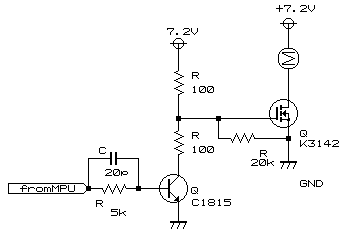
�܂�����̗\�z�ʂ���ݼ��ő������܂��B���ꂾ�Ƒ傫�ȓd���ŃX�C�b�`���O�o���܂��B20p�̺���ݻ�́A��ݼ��́u�����L�����A�̒~�ό��ʁv���ēz��ł��������߂ɓ����Ă܂��B
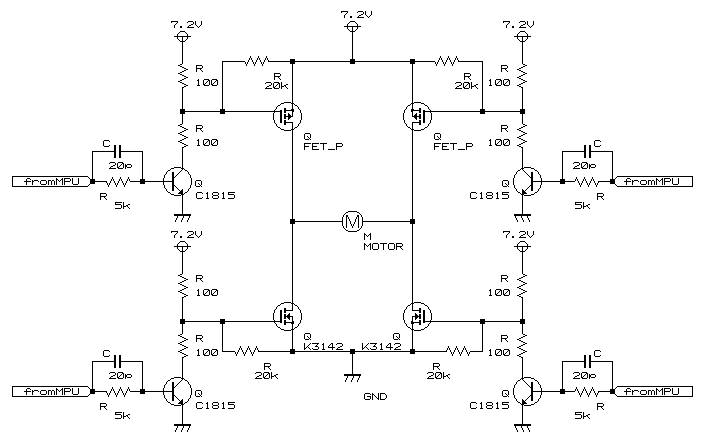
���݂ɂ��̉�H��ʲ���ނ�Pch-FET���쓮����̂ɂ��g���܂��B���̉�H4�g����H��د�ނ��쓮�ł���킯�ł��ˁB���̒ʂ�B
�₽��߂�����ʓ|�ȉ�H�ł��ˁB�܂�FET��������ő�̗��R�͍��z�ł��傤�ȁB����g�Ƃ��Ă��ڰ���͌y�������������ǂȂ����(�G�L߄D�`)
(߁��)��y�ɐu��
(߁��)�����\��FET��ײ�ނ�������